2026年03月02日 星期一
说起自动驾驶,现如今早已不是什么新鲜概念。从小时候开始,自动驾驶汽车就在大荧幕中频频出现,到如今自动驾驶技术逐步走向成熟,走出荧幕,这一切都离不开科学技术的快速发展。不过在如此多厂商研发自动驾驶技术的今天,你知道自动驾驶究竟有几种方式可以实现么?接下来,就让我们探究一二。
在现有技术水平上,自动驾驶大致可以分为两种技术路线:
第一种是基于车辆现有雷达和传感器,以ADAS(Advanced Driver Assistance Systems高级驾驶辅助系统)为切入点,进行的自动驾驶研究。这种技术偏向于让车辆进行即使演算,通过摄像头和雷达等车载设施的配合让车辆达到自动驾驶目的。

第二种以V2V(vehicle to vehicle意为车车信息交互)和V2X(Vehicle to X意为车与外界信息交互)为基础,让车辆通过移动互联,与周边环境建立信息通讯,从而得知实时交通状况,实现可预见性自动驾驶。

现如今,这两种技术都有不小进步,但距离真正意义上的自动驾驶,还是具有相当一段差距的。
以ADAS为基础的自动驾驶:
为什么要将ADAS作为自动驾驶的基础呢?原因很简单,因为ADAS俨然已经具备了量产基础,各种驾驶辅助系统向中低端车型逐步渗透就是最好证明。

目前,虽说ADAS的全球市场渗透率还不高,大约只有5%,但随着汽车安全性和智能化需求的增加,未来ADAS的市场渗透率还会大幅度提升。根据咨询公司PRNewswire预测,到了2020年,全球ADAS渗透率将会达到25%,全球新车ADAS搭载率更是有望突破50%,如此庞大的一个渗透基数,用来作为自动驾驶的基础难道还不够么?

并且,ADAS在硬件方面也都相当成熟,博世、恩智浦、大陆等零部件供应商每年向车企供应的传感器、执行器早已达到千万数量级,如此庞大的一个供应量足以说明,ADAS在硬件方面已经相当可靠。特别是恩智浦近日还利用最新BlueBox引擎,发布了功能强大的自动驾驶平台。

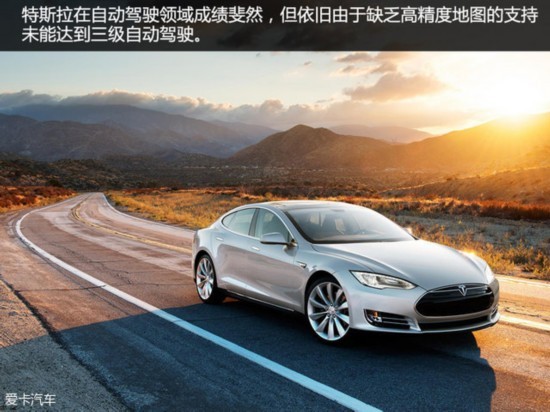
不过仅仅依靠ADAS就能够实现自动驾驶么?当然不是。拿特斯拉为例,特斯拉在ADAS领域做得可谓超前,但它依旧只能达到二级自动驾驶水准,这一切的原因还是由于缺乏高精度地图的有效支持。
现如今,高精度地图俨然已经成为自动驾驶的必要不充分条件。根据地图厂商的划分,高精度地图大致可以分为两大类,第一种是ADAS级高精度地图,它的精确程度可以达到米级;第二种是HAD级高精度地图,它的精确程度更是可以达到厘米级别。
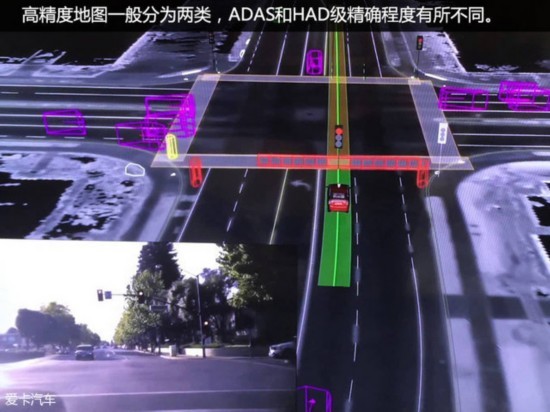
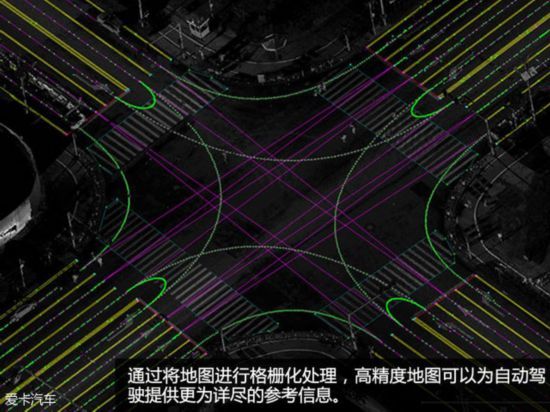
由于两种地图的目的不同,ADAS级更多只是收录道路形状、坡度等基本信息,然后用于配合车辆本身的驾驶辅助系统,减轻驾驶压力。HAD级收集的信息则更为精准,车道类型、宽度,道路周围环境,它都会详细记录,这样一来车辆才会有更为详尽的参考信息,所以在ADAS的基础上,高精度地图已然成为不可或缺的一部分。
不过由于城市道路的复杂性,高精度地图在城市内部道路的采集还是具有相当难度,发展成熟还需假以时日。

以车联网为主导的自动驾驶:
说完以ADAS为基础的自动驾驶,我们再来谈谈以车联网为主导的自动驾驶又是怎么一回事?
简单来讲,V2V和V2X技术理念就是在汽车上加装一个通讯设备,然后将交通指示灯、道路标识、道路行驶车辆、行人等全都作为信号发射源来进行实时通讯。这样就算汽车本身不具备探测能力,但通过不断询问周边车辆和交通设施,也能够了解其周边的交通环境,从而实现安全的自动驾驶。
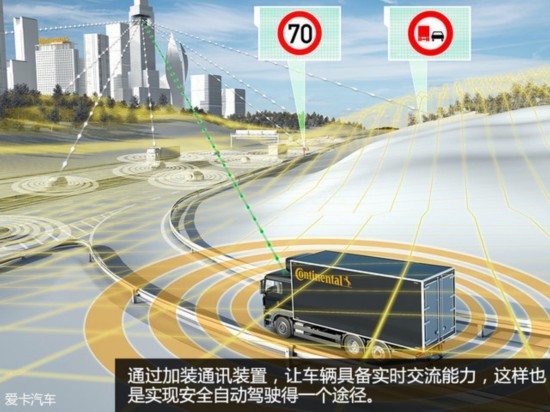
V2V、V2X技术相对于ADAS的最大优势就在于,它可以让车辆具备预见性,而不是到了眼前才做出应有反应。拿信号灯为例,ADAS是基于摄像头来识别图像,通过算法来判断信号灯究竟是红是绿的,而V2X可以让车辆在百米之外就收到信号,从而得知信号灯状态,这就让自动驾驶变得更为简单。
不过,这种技术依旧需要高精度地图作为基础。它最大的难点在于,在所有交通设备上都加装信号接收装置和通讯器材是一件非常庞大的事情,并且信号频率如何统一也是摆在研究人员面前的难题。